





Børsteløse DC-motorer bruges, fordi de er effektive, pålidelige og kræver mindre vedligeholdelse end børstede motorer. De bruger elektronisk kommutation i stedet for børster, hvilket forbedrer kontrollen og reducerer slid. Deres ydeevne afhænger af motordesign, timing, feedback, kontrolmetode, drivelektronik, hastighedsmomentadfærd og varmegrænser. Denne artikel giver information om alle disse punkter.

Grundlæggende principper for børsteløs DC-motor
Hvad er en børsteløs DC-motor (BLDC)?
En børsteløs jævnstrømsmotor (BLDC) er en permanentmagnetmotor, der drives af en jævnstrømskilde, som drives ved hjælp af elektronisk kommutation i stedet for børster og en mekanisk kommutator. En controller skifter strøm gennem statorviklingerne i en planlagt sekvens for at skabe et roterende magnetfelt. Rotoren indeholder permanente magneter, der følger dette roterende felt, hvilket skaber rotation. Fordi der ikke er børster, der gnider mod en kommutator, reduceres mekanisk slid, vedligeholdelsen er lavere, og effektiviteten er ofte højere. Hastighed og moment styres af, hvordan controlleren tider skiftet og justerer spænding og strøm.
BLDC vs Brushed DC vs PMSM
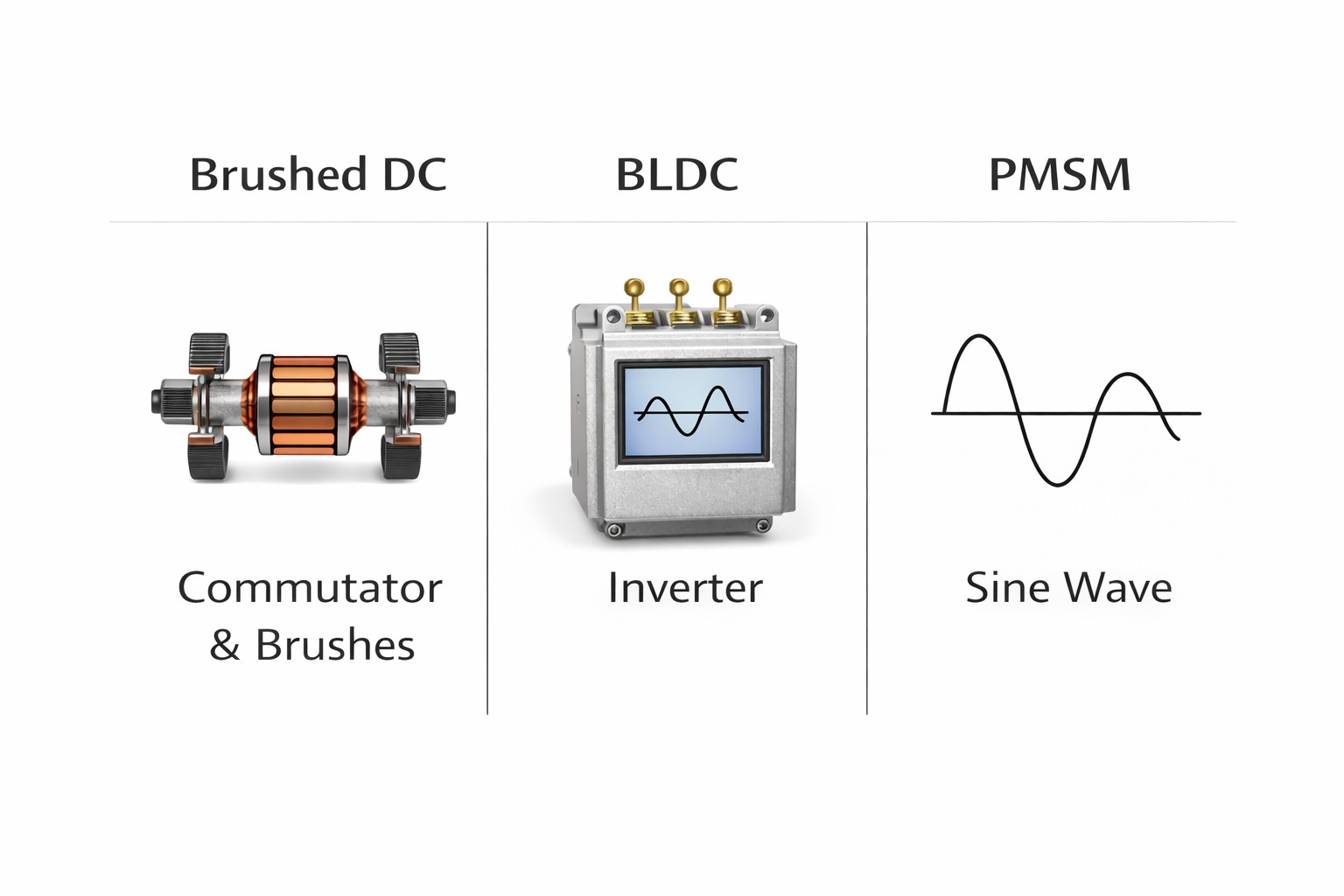
Børstede DC-motorer bruger børster og en kommutator til at skifte strøm inde i motoren, hvilket gør styringen enkel, men tilføjer sliddele. BLDC-motorer fjerner børsterne og bruger en elektronisk controller til at skifte statorfaser, så omkoblingen håndteres elektronisk. PMSM-motorer bruger også permanente magneter og elektronisk styring, så deres hardware kan ligne en BLDC-motor. Den fælles forskel er, hvordan motorens spændingsbølgeform formes, og hvordan controlleren driver faserne. BLDC-systemer er ofte forbundet med trapezformede bølgeformer og trinbaseret kommutering, mens PMSM-systemer ofte forbindes med sinusformede bølgeformer og glattere kontrolmetoder.
Elektronisk kommutation og skiftetid
Grundlæggende principper for børsteløs DC-motor
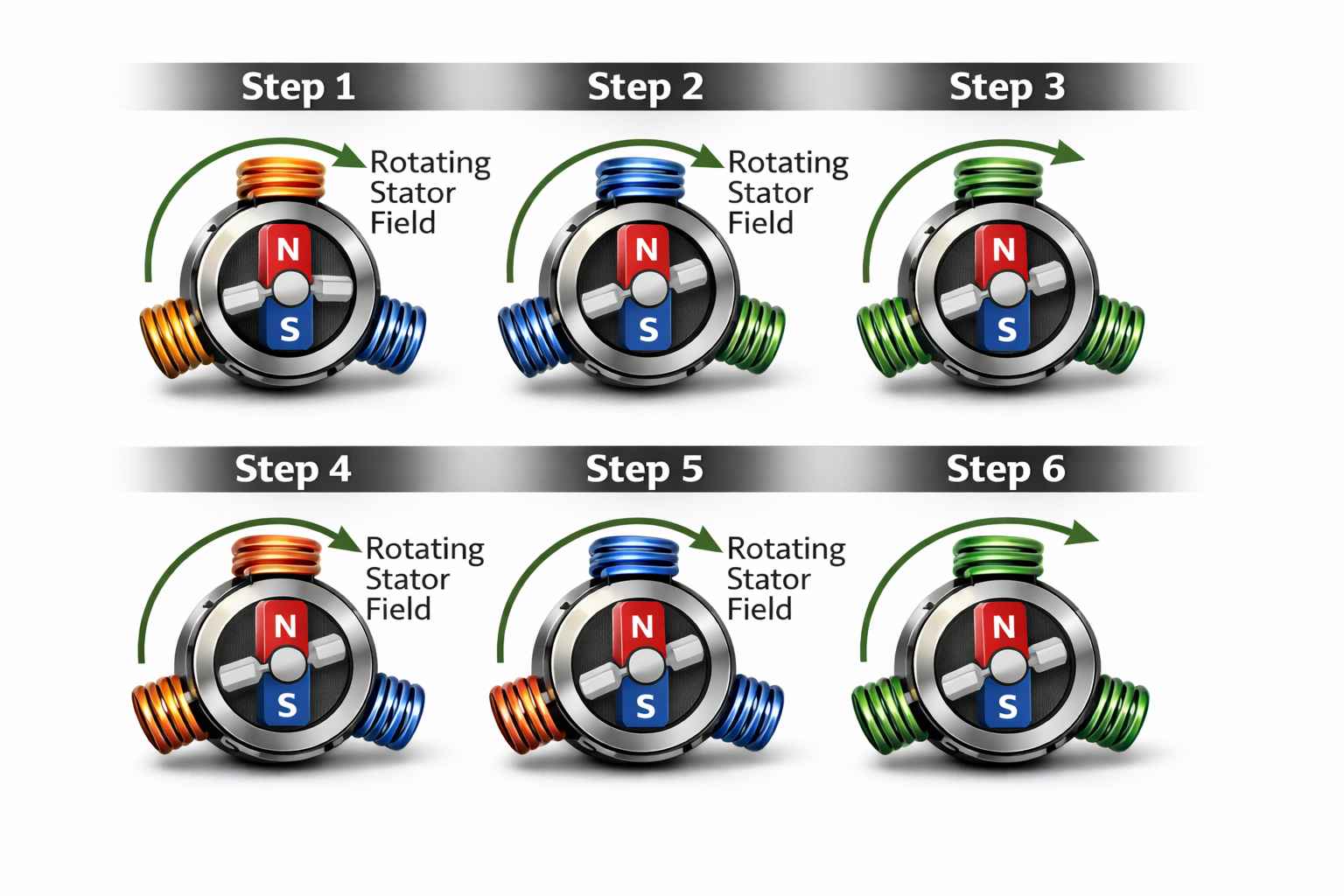
En BLDC-motor skaber bevægelse, når strømmen i statorviklingerne skaber et magnetfelt, der interagerer med rotorens permanente magneter. Controlleren sender strøm til viklingerne i gentagende rækkefølge, så den stærkeste del af statorens magnetfelt bliver ved med at skifte rundt om motoren. Dette skiftende mønster fungerer som et roterende magnetfelt. Når statorfeltet bevæger sig, bliver rotormagneterne ved med at dreje for at holde sig på linje med det. Denne stabile efterfølgende bevægelse er det, der skaber kontinuerlig rotation og moment.
Skiftetidspunkt og dens virkninger
• Når skiftet sker for tidligt, fører statorfeltet rotorens position, og momentet bliver svagere.
• Når skiftet sker for sent, halter statorfeltet bagefter rotoren, og momentbølgen øges.
• Korrekt skiftetid forbedrer momenteffektiviteten og reducerer støj og vibrationer.
BLDC Motorkonstruktion og Kernekomponenter
Kernemotordele
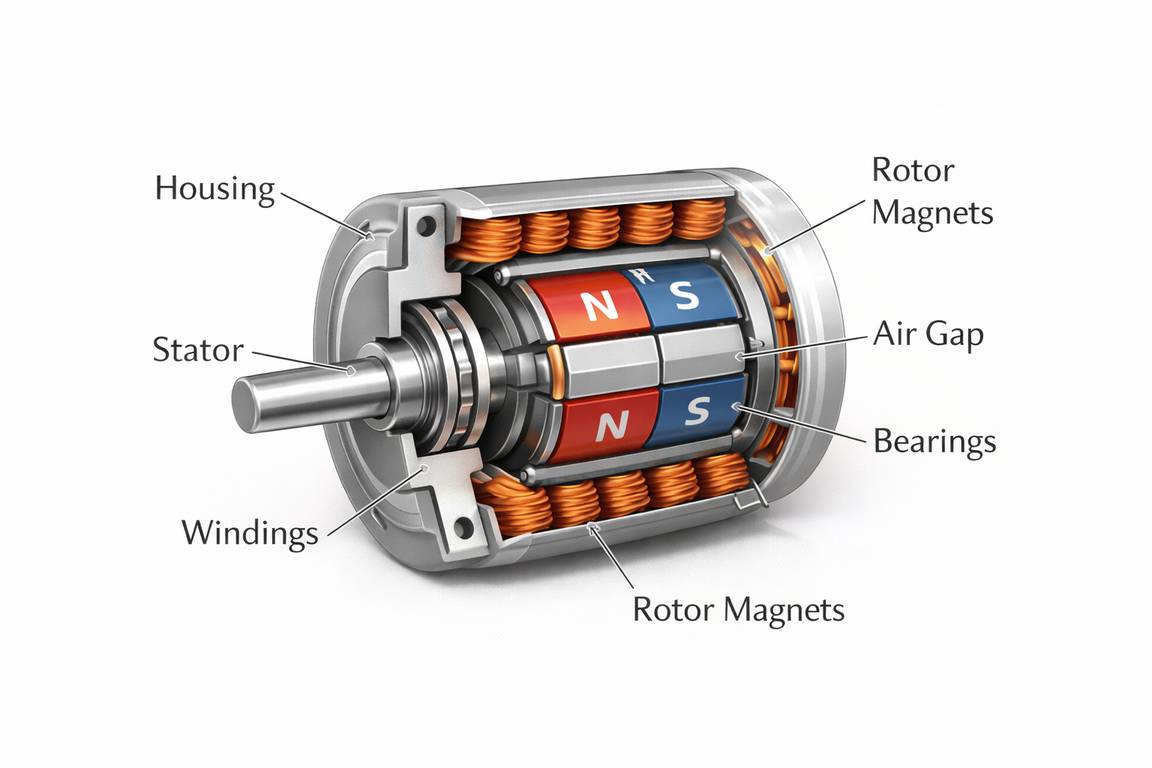
En BLDC-motor består af en stator, en rotor med permanente magneter, et luftgab, lejer og et hus. Statoren er lavet af lamineret stål og bærer flerfaseviklinger, der genererer det roterende magnetfelt. Rotoren indeholder permanente magneter, der følger dette roterende felt for at skabe bevægelse. Luftspalten mellem stator og rotor påvirker magnetisk kobling, momenttæthed og glidende drift. Lejerne understøtter akslen og påvirker friktion, vibration og levetid. Huset holder samlingen justeret og hjælper med at fjerne varme fra motoren.
Rotordesignfaktorer
Rotordesign påvirker moment, hastighedsadfærd og mekanisk styrke. Polantal bestemmer forholdet mellem elektrisk omkobling og mekanisk rotation; Flere poler forbedrer momentet ved lav hastighed, men kræver hurtigere elektrisk omskiftning. Placeringen af magneten påvirker også ydeevnen. Overflademonterede magneter er almindelige og simple, mens indvendige magneter giver bedre mekanisk fastholdelse ved højere hastigheder. Magnetmaterialet bestemmer magnetisk styrke og temperaturstabilitet og påvirker momentkapacitet og pålidelighed.
Snoede forbindelser: Star (Wye) vs Delta
Statorviklingerne i en BLDC-motor er ofte forbundet i stjerneform (wye) eller deltaform.
| Forbindelse | Praktisk effekt (typisk) | Hvad den understøtter |
|---|---|---|
| Star (Wye) | Højere moment pr. volt ved lavere hastighed | Stærkere lavhastighedsdrift på en begrænset spænding |
| Delta | Højere hastighedspotentiale ved samme spænding | Højere omdrejninger ved lavere momentbehov |
Rotorpositionsdetektion og feedback-muligheder
Hvorfor skal drevet have rotorens position?
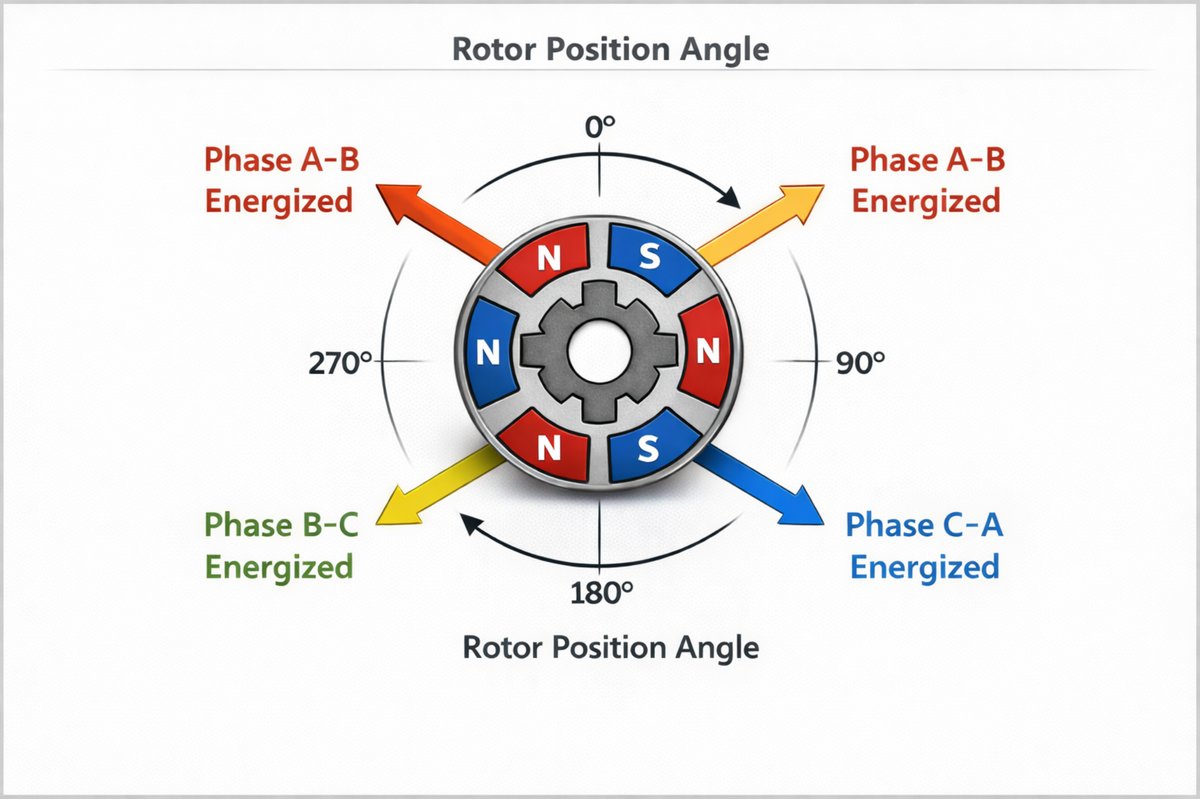
Controlleren skal kende rotorens position (eller estimere den), så den kan aktivere de korrekte faser på det korrekte tidspunkt. Uden information om rotorens position driver kommuteringstidspunktet, momentet falder, og opvarmningen stiger under opstart og lavhastighedsdrift.
Hall-sensorer vs encoders vs sensorløse BLDC
• Hall-sensorer: overkommelige og pålidelige til grundlæggende pendling og stærkt opstartsmoment.
• Encodere/resolvere: bruges når præcis hastigheds-/positionskontrol er nødvendig.
• Sensorløs (back-EMF): færre ledninger/dele, men hårdere ved meget lav hastighed og opstart på grund af svag back-EMF.
BLDC-kommuterings- og kontrolmetoder
Kommuderingsstile: 6-trins vs sinusformet / FOC
| Metode | Hvad controlleren gør | Resultat |
|---|---|---|
| 6-trins (trapezformet) | Switches faser i diskrete trin | Enkelt og robust; Mere bølge/støj mulig |
| Sinusformet / FOC | Driver glatte fasestrømme ved hjælp af vektorstyring | Glattere moment; ofte mere stille og effektive over et bredt område |
Hvornår 6-step giver mening vs. hvornår FOC er bedre
Begge metoder fungerer godt, men de vælges til forskellige formål.
• 6-trins metoden vælges ofte, når enkelhed, pris og robusthed betyder noget.
• FOC vælges, når glat moment, lav støj og præcis kontrol gælder over et bredt hastighedsområde.
Elektronik i BLDC-drevsystemet
Trefaset inverterbro
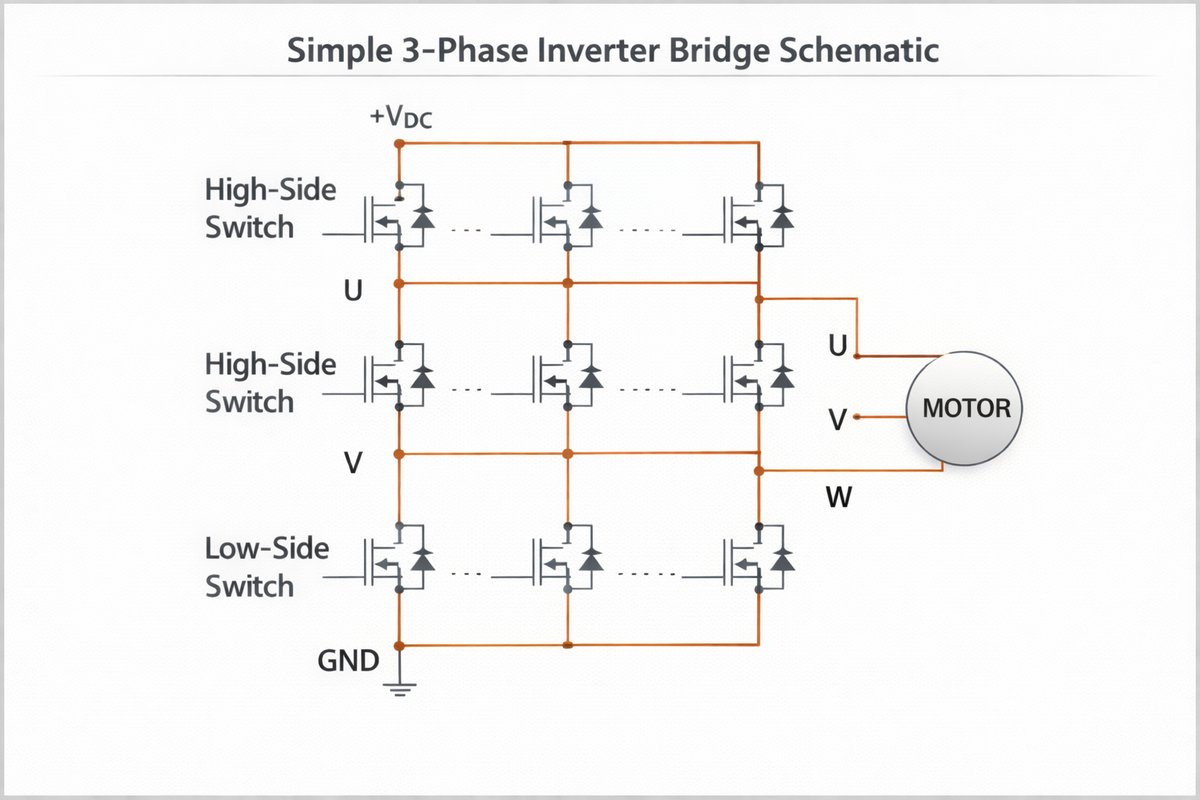
En BLDC-motor kræver et elektronisk drev for at udføre omkobling. Effekttrinnet er en trefaset inverter bestående af seks kontakter. Ved at skifte disse enheder i den korrekte rækkefølge leder drevet jævnstrøm ind i motorens faser og producerer et roterende statorfelt.
Controllerroller
• Strømkontakter: MOSFET'er ved mange BLDC-spændingsområder.
• Portfører + beskyttelse: sikker omkobling, dødtidskontrol og fejlhåndtering.
• Kontrollogik (MCU/DSP): kommuteringstiming, PWM-styring, sensoraflæsning og grænsehåndtering.
Hastighed, drejningsmoment og bremsning i børsteløse jævnstrømsmotorer
Hastigheds- og momentkontrol: PWM og strømgrænser
Hastighedskontrol: PWM's arbejdscyklus ændrer den effektive jævnspænding til motoren, hvilket ændrer dens hastighed.
Hastighedsløkke: Controlleren sammenligner målhastigheden med den målte eller estimerede hastighed og retter outputtet, hvis der opstår en fejl.
Drejningsmoment og strøm: Motorens moment er tæt forbundet med fasestrøm, så begrænsning af strøm begrænser også momentet.
Strømbegrænsning: Drevet overvåger strømmen og reducerer PWM efter behov for at forhindre skader under start, stop og pludselige belastningsændringer.
Retningsskift og Grundlæggende Bremsning/Regeneration
• Retningsskift: Motoren kan køre i modsat retning ved at vende omkoblingsrækkefølgen, hvilket ændrer fasesekvensen.
• Bremsning: Drivkraften kan påføre drejningsmoment modsat bevægelsesretningen for at bremse rotoren på en kontrolleret måde.
• Regenerering: Ved opbremsning under de rette forhold kan motoren fungere som generator og sende energi tilbage til DC-bussen.
Retningskontrol, bremsning og regenerering kommer alle fra, hvordan drevet skifter motorfaser og styrer strømmen. Ved at ændre kommuteringssekvensen og kontrollere momentet kan den samme BLDC-motor køre fremad eller baglæns, bremse jævnt og i nogle systemer returnere en del af sin energi til forsyningen.
Ydelse og begrænsninger for børsteløse jævnstrømsmotorer
Hvordan opfører hastighed og moment sig i en BLDC-motor?
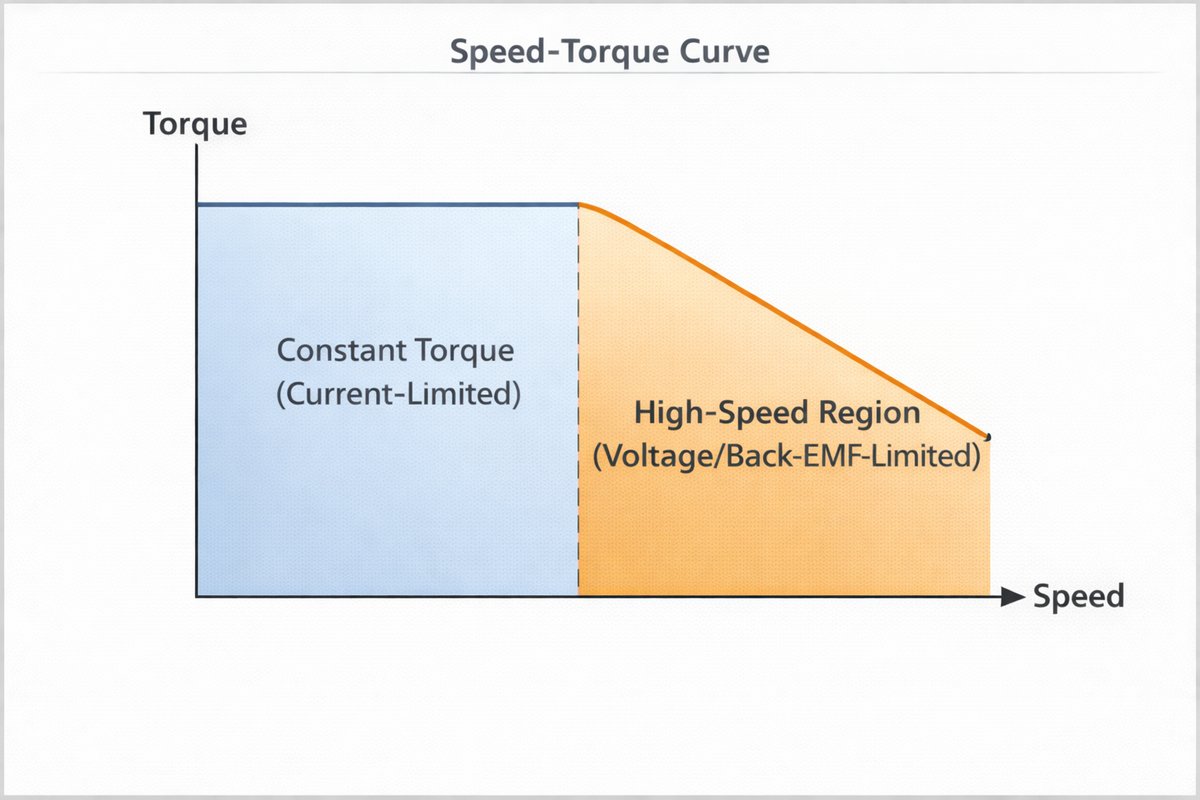
En børsteløs DC-motor giver ikke det samme moment ved alle hastigheder. Ved lav hastighed er momentet begrænset af drevets strømkapacitet. Ved højere hastigheder når motoren et punkt, hvor DC-busspændingen og bag-EMF begrænser, hvor meget drejningsmoment drevet kan producere. På en hastighed–moment-kurve viser dette sig som et fladt område med næsten konstant moment ved lavere hastigheder og et faldende momentområde ved højere hastigheder.
Hvilke faktorer bestemmer tophastigheden for en BLDC-motor?
• DC-busspænding: En højere DC-busspænding giver mere spændingsplads til at overvinde back-EMF ved høj hastighed.
• Back-EMF (Ke/Kv): Back-EMF stiger med hastigheden og reducerer den spænding, som drevet kan bruge til at føre strøm ind i viklingerne.
• Kontrolmetode: Forskellige kontrolmetoder påvirker, hvor godt drevet opretholder momentet, når hastigheden stiger.
• Termikker: Tab i viklinger og elektronik øges med hastighed og belastning, hvilket begrænser, hvor længe motoren kan køre ved høj hastighed.
Specifikationer, der betyder mest for børsteløse jævnstrømsmotorer
| Spec-term (katalog) | Hvad fortæller det dig | Hvorfor det betyder noget |
|---|---|---|
| Nomineret spænding / DC-busområde | Normalt forsyningsspændingsområde | Sætter muligt hastighedsområde og hjælper med at vælge det rigtige drev |
| Nomineret strøm/kontinuerlig strøm | Strøm, der er sikker til langvarig brug | Viser, hvor meget opvarmning der vil ske ved en given belastning |
| Nomineret effekt (W) | Udgangseffekt på et bestemt punkt | Hjælper med at sammenligne, hvor stærke forskellige motorer er |
| Angivet moment/topmoment | Hvor meget drejekraft motoren kan lave | Viser, hvordan den håndterer start- og korte overbelastninger |
| Hastighed (RPM) | Normalt driftshastighedsområde | Hjælper med at matche motoren til gearene og til belastningen |
| Kv / Ke og Kt konstanter | Links hastighed, spænding og moment | Forbinder spænding og strøm til reel motorydelse |
| Effektivitet | Hvor meget inputeffekt bliver til mekanisk effekt | Påvirker opvarmning, batterilevetid og driftsomkostninger |
Effektivitet, tab og varme i børsteløse jævnstrømsmotorer
Tabskilder i en børsteløs DC-motor
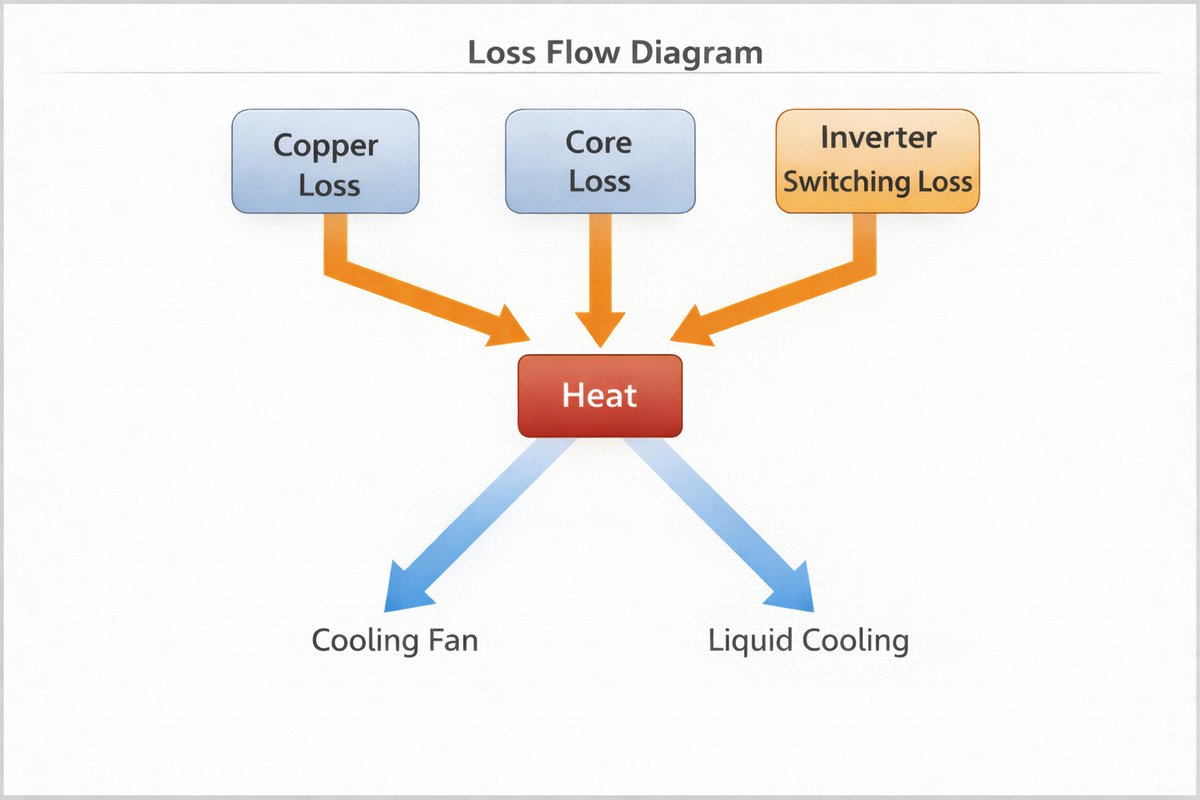
I et børsteløst DC-motorsystem omdannes ikke al indgangseffekt til brugbar mekanisk udgang. Noget af det bliver til varme inde i motoren og drivkraften. Det meste af denne varme kommer fra kobbertab, kernetab og switch-tab, og disse tab vokser, når strøm og hastighed øges.
• Kobbertab (I²R): Kobbertab opstår i statorviklingerne og stiger med strømmen. Højere moment kræver højere strøm, så kobbertab øges, efterhånden som momentbehovet stiger.
• Kerne- eller jerntab: Kernetab er forbundet med det skiftende magnetfelt i statoren. Den stiger med elektrisk frekvens og fluxniveau, så den bliver mere nødvendig ved højere hastigheder.
• Koblingstab: Koblingstab opstår i effektelektronikken, der driver motoren. Det afhænger af PWM-frekvensen, typen af koblingsenheder og strømmen, der løber under hver omskiftningsbegivenhed.
Køling og termisk beskyttelse i BLDC-systemer
Termisk styring er nødvendig for at holde både motor og inverter inden for sikre driftsgrænser. Varme bør fjernes gennem en termisk ledende monteringsvej og tilstrækkelig luftstrøm, mens strømgrænserne bør sættes konservativt, når kølingen er begrænset eller der forventes lange driftsperioder. Temperaturmåling og termisk tilbagerulning kan yderligere beskytte systemet ved at reducere strømmen, når temperaturerne bliver for høje, hvilket forbedrer pålideligheden og levetiden.
Anvendelser af børsteløse jævnstrømsmotorer
Almindelige anvendelser af børsteløse DC-motorer
• Blæsere og blæsere til at flytte luft
• Pumper til at flytte væsker
• Elværktøj og små maskiner
• Automatisering og bevægelsessystemer
• Robotled og aktuatorer
• Batteridrevne køretøjer og enheder
Konklusion
Børsteløse DC-motorer fungerer ved at kombinere permanente magneter med elektronisk styring for at skabe jævn og effektiv bevægelse. Deres faktiske ydeevne afhænger af korrekt kommuteringstiming, rotorpositionsfeedback, styremetode, inverterbetjening, køling og korrekt motor-drev tilpasning. Hastighed, moment, effektivitet og pålidelighed påvirkes alle af disse faktorer. At forstå dem hjælper med at forklare, hvordan BLDC-systemer fungerer, deres grænser, og hvad der påvirker langsigtet ydeevne.
Ofte stillede spørgsmål [FAQ]
Hvordan starter en sensorløs BLDC-motor fra stilstand?
Det starter med at tvinge rotoren ind i en kendt position og derefter køre motoren i åben sløjfe. Når motoren når tilstrækkelig hastighed til tilbage-EMF-detektion, skifter controlleren til normal sensorløs drift.
Hvad forårsager støj og vibrationer i en BLDC-motor?
Støj og vibrationer skyldes rotorubalance, fejljustering, slidte lejer, tandhjulsmoment, ujævne luftgaber og PWM-omskiftning.
Hvordan påvirker belastningsinerti en BLDC-motor?
Høj belastningsinerti gør motoren langsommere til at accelerere og bremse. Den øger også momentbehovet og kan øge strømmen ved hurtige hastighedsændringer.
Hvilke strømforsynings- og ledningspunkter betyder noget i et BLDC-system?
Strømforsyningen skal håndtere spidsstrøm uden spændingsfald. Kondensatorer skal glatte koblingsspidser, og ledningerne skal være korrekt dimensionerede, korte og godt jordede for at reducere støj.
Hvilke beskyttelsesfunktioner bruges i BLDC-drev?
BLDC-drev bruger overstrøm, overspænding, underspænding, kortslutning, stall og overtemperaturbeskyttelse for at forhindre skader.
Hvordan påvirker miljøforhold en BLDC-motor?
Støv, fugt, varme, vibrationer og korrosive forhold kan reducere ydeevnen, beskadige dele og forkorte motorens levetid.









